1. විවිධ ව්යුහාත්මක මූලධර්ම
ආකෘති දෙකේ සැලසුම් මූලධර්ම වෙනස් වන අතර, නැමීමේ ස්ලයිඩරයේ දෙපස සමමුහුර්තකරණය සහතික කිරීම සඳහා විවිධ ව්යුහයන් ඇති වේ. ව්යවර්ථ අක්ෂ නැමීමේ යන්ත්රය වම් සහ දකුණු පැද්දීමේ දඬු සම්බන්ධ කිරීම සඳහා ව්යවර්ථ අක්ෂයක් භාවිතා කර දෙපස සිලින්ඩර ඉහළට සහ පහළට ගෙනයාමට සමමුහුර්ත කිරීමේ යාන්ත්රණයක් බල කරමින් ව්යවර්ථ අක්ෂයක් සාදයි, එබැවින් ආතති අක්ෂ සමමුහුර්ත කිරීමේ නැමීමේ යන්ත්රය යාන්ත්රික බල සමමුහුර්ත කිරීමේ ක්රමයකි. , සහ ස්ලයිඩරයේ සමාන්තරකරණය ස්වයංක්රීය මැදිහත්වීම ස්වයංක්රීයව පරීක්ෂා කළ නොහැක.
විද්යුත් හයිඩ්රොලික් සමමුහුර්ත නැමීමේ යන්ත්රය ස්ලයිඩරය සහ බිත්ති තහඩුව මත චුම්බක (දෘශ්ය) පරිමාණයක් ස්ථාපනය කිරීමයි. සංඛ්යාත්මක පාලන පද්ධතියට ඕනෑම වේලාවක චුම්බක (ප්රකාශ) පරිමාණයේ ප්රතිපෝෂණ තොරතුරු හරහා ස්ලයිඩරයේ දෙපැත්තේ සමමුහුර්තකරණය විශ්ලේෂණය කළ හැකිය. දෝෂයක් තිබේ නම්, ස්ලයිඩරයේ දෙපස ආඝාතය සමමුහුර්ත කිරීම සඳහා සංඛ්යාත්මක පාලන පද්ධතිය සමානුපාතික විද්යුත් හයිඩ්රොලික් සර්වෝ කපාටය හරහා සකස් කරනු ලැබේ. සංඛ්යාත්මක පාලන පද්ධතිය, හයිඩ්රොලික් පාලන කපාට සමූහය සහ චුම්බක පරිමාණය විද්යුත් හයිඩ්රොලික් සමමුහුර්ත නැමීමේ යන්ත්රයේ ප්රතිපෝෂණ සංවෘත ලූප පාලනය වේ.

2. නිරවද්යතාව
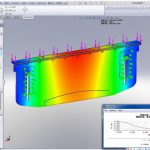
ස්ලයිඩරයේ සමාන්තරකරණය වැඩ කොටසෙහි කෝණය තීරණය කරයි. ආතති අක්ෂය සමමුහුර්ත නැමීමේ යන්ත්රය තත්ය කාලීන දෝෂ ප්රතිපෝෂණයකින් තොරව ස්ලයිඩරයේ සමමුහුර්තකරණය යාන්ත්රිකව පවත්වා ගෙන යන අතර යන්ත්රයටම ස්වයංක්රීය ගැලපීම් කළ නොහැක. ඊට අමතරව, එහි අර්ධ භාර ධාරිතාව දුර්වලය (ආතති අක්ෂය සමමුහුර්ත නැමීමේ යන්ත්රය ව්යවර්ථ අක්ෂය භාවිතා කර සමමුහුර්ත කිරීමේ යාන්ත්රණයට දෙපස සිලින්ඩර ඉහළට සහ පහළට ගෙන යාමට බල කරයි. දිගු කාලීන අර්ධ භාරය නම් ආතති අක්ෂය විකෘති වීමට හේතු වේ. .), විද්යුත් හයිඩ්රොලික් සමමුහුර්ත නැමීමේ යන්ත්රය සමානුපාතික විද්යුත් හරහා පද්ධතියකි. ද්රව කපාට සමූහය ස්ලයිඩර් සමමුහුර්තකරණය පාලනය කරන අතර චුම්බක (දෘශ්ය) පරිමාණය තත්ය කාලීන දෝෂ ප්රතිපෝෂණ සපයයි. දෝෂයක් තිබේ නම්, ස්ලයිඩරයේ සමමුහුර්තකරණය පවත්වා ගැනීම සඳහා පද්ධතිය සමානුපාතික කපාටය හරහා සකස් කරනු ලැබේ.
3. වේගය
එහි ධාවන වේගය තීරණය කරන යන්ත්රයේ කාර්යයේ කරුණු දෙකක් තිබේ: (1) ස්ලයිඩර් වේගය, (2) පසුගාමී වේගය, (3) නැමීමේ පියවර.
ව්යවර්ථ අක්ෂය සමමුහුර්ත නැමීමේ යන්ත්රය 6: 1 හෝ 8: 1 සිලින්ඩරයක් භාවිතා කරයි, එය මන්දගාමී වන අතර විද්යුත්-හයිඩ්රොලික් සමමුහුර්ත නැමීමේ යන්ත්රය 13: 1 හෝ 15: 1 සිලින්ඩරයක් භාවිතා කරයි, එය වේගවත් වේ. එබැවින් විද්යුත් හයිඩ්රොලික් සමමුහුර්ත නැමීමේ යන්ත්රයේ වේගවත් බැසීමේ වේගය සහ ආපසු හැරීමේ වේගය ව්යවර්ථ සමමුහුර්ත නැමීමේ යන්ත්රයට වඩා බෙහෙවින් වැඩි ය.
ව්යවර්ථ අක්ෂය සමමුහුර්ත නැමීමේ යන්ත්රයේ ස්ලයිඩරය පහළට ගමන් කරන විට, වේගයට වේගයෙන් පහළට සහ මන්දගාමී වීමේ ක්රියාකාරකම් තිබුණද, වේගයෙන් පහළට සහ ආපසු පැමිණීමේ වේගය 80mm/s පමණක් වන අතර වේගවත් හා මන්දගාමී ස්විචය සුමට නොවේ. පසුපස මාපකයේ ධාවන වේගය 100mm/s පමණි.
වැඩ කොටස පියවර කිහිපයකින් නැමිය යුතු නම්, ආතති අක්ෂය සමමුහුර්ත නැමීමේ යන්ත්රයේ එක් එක් ක්රියාවලිය වෙන වෙනම සැකසිය යුතු අතර, සැකසීමේ ක්රියාවලිය ඉතා අපහසු වේ. කෙසේ වෙතත්, විද්යුත්-හයිඩ්රොලික් සමමුහුර්ත යන්ත්රයට පරිගණකය හරහා එක් එක් පියවරේ ක්රියාවලිය සකසා සුරැකිය හැකි අතර අඛණ්ඩව ක්රියා කළ හැකි අතර එමඟින් නැමීමේ පියවරේ වේගය බෙහෙවින් වැඩි දියුණු කරන අතර වැඩ කාර්යක්ෂමතාව වැඩි කරයි.
විද්යුත් හයිඩ්රොලික් සමමුහුර්ත නැමීමේ යන්ත්රයේ ස්ලයිඩරය පහළට යන විට, වේගයට වේගයෙන් පහළට සහ මන්දගාමී වීමේ ක්රියාකාරකම් ඇත. වේගයෙන් පහළට සහ ආපසු පැමිණීමේ වේගය 200mm/s දක්වා ළඟා විය හැකි අතර වේගවත් හා මන්දගාමී පරිවර්තනය සුමට වන අතර එමඟින් නිෂ්පාදන කාර්යක්ෂමතාව බෙහෙවින් වැඩි දියුණු කළ හැකිය. ඒ සමගම, පසුගාමී ධාවන වේගය 300mm / s දක්වා ළඟා වේ.
4. ශක්තිය
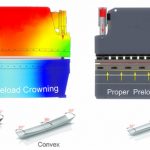
එහිම සැලසුම නිසා, ව්යවර්ථ සමමුහුර්ත නැමීමේ යන්ත්රය විකේන්ද්රික බර යටතේ නැමිය නොහැක. එය දිගු කාලයක් විකේන්ද්රික බර යටතේ නැමී ඇත්නම්, එය ව්යවර්ථ පතුවළ විකෘති කිරීමට හේතු වේ. විද්යුත් හයිඩ්රොලික් සමමුහුර්ත CNC නැමීමේ යන්ත්රය එවැනි ගැටළුවක් නොමැත. වම් සහ දකුණු පැතිවල Y1 සහ Y2 අක්ෂය ස්වාධීනව ක්රියා කරයි, එබැවින් එය අර්ධ බරක් යටතේ නැමිය හැකිය. ඉලෙක්ට්රෝ හයිඩ්රොලික් සමමුහුර්ත නැමීමේ යන්ත්රයක ක්රියාකාරී කාර්යක්ෂමතාව ව්යවර්ථ අක්ෂය සමමුහුර්ත නැමීමේ යන්ත්ර දෙකේ සිට තුන දක්වා සමාන විය හැක.
ආශ්රිත නිෂ්පාදන
 CNC මුද්රණ තිරිංග නැමීමේ යන්ත්රයේ ක්රියාකාරී මූලධර්මය සහ සංයුතිය
CNC මුද්රණ තිරිංග නැමීමේ යන්ත්රයේ ක්රියාකාරී මූලධර්මය සහ සංයුතිය- මුද්රණ තිරිංග නැමීමේ යන්ත්රයකට වන්දි පද්ධතියක් එක් කරන්නේ ඇයි?
- මුද්රණ තිරිංග CNC පද්ධති සංසන්දනය කිරීම සහ තෝරා ගැනීම
- CNC තහඩු ලෝහ බෙන්ඩරයේ E21 පද්ධතිය දැන ගැනීමට පියවර 4
- CNC තහඩු ලෝහ බෙන්ඩරය සඳහා අපගමනය වන්දි ලබා ගන්නේ කෙසේද
- වැඩියෙන්ම අලෙවි වන හයිඩ්රොලික් පීඩන හයිඩ්රොලික් වැඩමුළුව මුද්රණ හයිඩ්රොලික් ප්රෙස් ටොන් හයිඩ්රොලික්
- චීනය ටොන් 40 මුද්රණ තිරිංග
- හයිඩ්රොලික් බල මුද්රණ යන්ත්රයේ ආරක්ෂිත මෙහෙයුම් රීති
- WILA නැමීමේ මධ්යම හා ඝන තහඩු සඳහා කාර්යක්ෂම විසඳුම
- සාමාන්ය යාන්ත්රික දෝෂ සහ මුද්රණ තිරිංග නැමීමේ යන්ත්ර නඩත්තු කිරීම